Sensor Posisi
Dalam artikel ini kita akan melihat berbagai perangkat yang digolongkan sebagai Perangkat Input dan oleh karena itu disebut "Sensor" dan khususnya sensor-sensor yang bersifat Posisional.
Sesuai namanya, Sensor Posisi mendeteksi posisi sesuatu yang berarti bahwa mereka direferensikan ke atau dari beberapa titik atau posisi tetap. Jenis sensor ini memberikan umpan balik "posisi".
Salah satu metode untuk menentukan posisi, adalah dengan menggunakan "jarak", yang bisa berupa jarak antara dua titik seperti jarak yang ditempuh atau pindah dari suatu titik tetap, atau dengan "rotasi" (gerakan sudut). Misalnya, rotasi roda robot untuk menentukan jarak tempuh di sepanjang tanah. Apa pun itu, Sensor Posisi dapat mendeteksi pergerakan suatu objek dalam garis lurus menggunakan Sensor Linier atau dengan gerakan sudutnya menggunakan Sensor Rotasi.
Potensiometer
Yang paling umum digunakan dari semua "Sensor Posisi", adalah potensiometer karena merupakan sensor posisi yang murah dan mudah digunakan. Ini memiliki kontak penghapus yang terhubung ke poros mekanis yang dapat berupa sudut (rotasi) atau linier (tipe penggeser) dalam gerakannya, dan yang menyebabkan nilai resistansi antara penghapus / penggeser dan dua koneksi ujung berubah memberikan sinyal listrik keluaran yang memiliki hubungan proporsional antara posisi wiper aktual pada jalur resistif dan nilai resistansinya. Dengan kata lain, resistansi sebanding dengan posisi.

Gambar: Potensiometer
Potensiometer hadir dalam berbagai desain dan ukuran seperti tipe rotasi bulat yang umum tersedia atau tipe slider linier yang lebih panjang dan datar. Saat digunakan sebagai sensor posisi, benda bergerak terhubung langsung ke poros rotasi atau penggeser potensiometer.
Tegangan referensi DC diterapkan di dua sambungan tetap luar yang membentuk elemen resistif. Sinyal tegangan keluaran diambil dari terminal penghapus kontak geser seperti yang ditunjukkan di bawah ini.
Konfigurasi ini menghasilkan keluaran rangkaian tipe pembagi potensial atau tegangan yang sebanding dengan posisi poros. Kemudian misalnya, jika Anda menerapkan tegangan katakanlah 10v melintasi elemen resistif potensiometer, tegangan keluaran maksimum akan sama dengan tegangan suplai pada 10 volt, dengan tegangan keluaran minimum sama dengan 0 volt. Kemudian penghapus potensiometer akan memvariasikan sinyal keluaran dari 0 hingga 10 volt, dengan 5 volt yang menunjukkan bahwa penghapus atau penggeser berada pada posisi setengah jalan atau tengah.
Konstruksi Potensiometer

Gambar: Konstruksi sebuah potensiometer
Sinyal keluaran (Vout) dari potensiometer diambil dari sambungan penghapus tengah saat bergerak di sepanjang jalur resistif, dan sebanding dengan posisi sudut poros.
Contoh Rangkaian Penginderaan Posisi sederhana


Sementara sensor posisi potensiometer resistif memiliki banyak keunggulan: biaya rendah, teknologi rendah, mudah digunakan dll, sebagai sensor posisi mereka juga memiliki banyak kelemahan: keausan karena bagian yang bergerak, akurasi rendah, pengulangan rendah, dan respons frekuensi terbatas.
Tetapi ada satu kelemahan utama menggunakan potensiometer sebagai sensor posisi. Kisaran pergerakan penghapus atau penggesernya (dan karenanya sinyal keluaran yang diperoleh) terbatas pada ukuran fisik potensiometer yang digunakan.
Misalnya potensiometer putaran tunggal umumnya hanya memiliki putaran mekanis tetap antara 0o dan maksimum sekitar 240o hingga 240o. Namun, pot multi-putaran hingga 3600o (10 x 360o ) rotasi mekanis juga tersedia.
Sebagian besar jenis potensiometer menggunakan film karbon untuk jalur resistifnya, tetapi jenis ini berisik secara elektrik (derak pada kontrol volume radio), dan juga memiliki masa pakai mekanis yang pendek.
Pot lilitan kawat juga dikenal sebagai rheostat, dalam bentuk kawat lurus atau kawat resistif kumparan lilitan juga dapat digunakan, tetapi pot lilitan kawat mengalami masalah resolusi karena penghapusnya melompat dari satu segmen kawat ke segmen berikutnya menghasilkan logaritmik ( LOG) keluaran mengakibatkan kesalahan dalam sinyal keluaran. Ini juga mengalami gangguan listrik.
Untuk aplikasi presisi tinggi kebisingan rendah film polimer jenis elemen resistansi plastik konduktif atau potensiometer jenis cermet sekarang tersedia. Pot ini memiliki jalur resistif linier elektrik (LIN) gesekan rendah halus yang memberikan kebisingan rendah, umur panjang, dan resolusi yang sangat baik dan tersedia sebagai perangkat multi-putaran dan satu putaran. Aplikasi khas untuk jenis sensor posisi akurasi tinggi ini ada dalam aplikasi tuas kendali permainan komputer, roda kemudi, industri dan robot.
Sensor Posisi Induktif
Transformator Diferensial Variabel Linear
Salah satu jenis sensor posisi yang tidak mengalami masalah keausan mekanis adalah "Transformator Diferensial Variabel Linear" atau disingkat LVDT. Ini adalah sensor posisi tipe induktif yang bekerja dengan prinsip yang sama dengan trafo AC yang digunakan untuk mengukur gerakan. Ini adalah perangkat yang sangat akurat untuk mengukur perpindahan linier dan yang hasilnya sebanding dengan posisi inti yang dapat digerakkan.
Ini pada dasarnya terdiri dari tiga kumparan luka pada bekas tabung berongga, satu membentuk kumparan primer dan dua lainnya membentuk kumparan sekunder identik yang dihubungkan secara elektrik bersama-sama secara seri tetapi dengan beda fase 180o di kedua sisi kumparan primer.
Inti feromagnetik besi lunak yang dapat dipindahkan (kadang-kadang disebut "angker") yang terhubung ke objek yang sedang diukur, meluncur atau bergerak ke atas dan ke bawah di dalam badan tubular LVDT.
Tegangan referensi AC kecil yang disebut "sinyal eksitasi" (2 - 20V rms, 2 - 20kHz) diterapkan ke belitan primer yang pada gilirannya menginduksi sinyal EMF ke dua belitan sekunder yang berdekatan (prinsip transformator).
Jika angker inti magnet besi lunak tepat berada di tengah tabung dan belitan, "posisi nol", dua ggl yang diinduksi dalam dua belitan sekunder saling meniadakan karena berbeda fase 180o , sehingga tegangan keluaran yang dihasilkan adalah nol. Karena inti dipindahkan sedikit ke satu sisi atau sisi lain dari posisi nol atau nol ini, tegangan yang diinduksi di salah satu sekunder akan menjadi lebih besar daripada tegangan sekunder lainnya dan keluaran akan dihasilkan.
Polaritas sinyal keluaran tergantung pada arah dan perpindahan inti yang bergerak. Semakin besar pergerakan inti besi lunak dari posisi nol pusatnya, semakin besar sinyal keluaran yang dihasilkan. Hasilnya adalah keluaran tegangan diferensial yang bervariasi secara linier dengan posisi inti. Oleh karena itu, sinyal keluaran dari sensor posisi jenis ini memiliki amplitudo yang merupakan fungsi linier perpindahan inti dan polaritas yang menunjukkan arah gerakan.
Fase sinyal keluaran dapat dibandingkan dengan fase eksitasi kumparan primer yang memungkinkan rangkaian elektronik yang sesuai seperti Penguat Sensor LVDT AD592 untuk mengetahui bagian mana dari kumparan inti magnet dan dengan demikian mengetahui arah perjalanan.
Transformator Diferensial Variabel Linear

Ketika angker dipindahkan dari satu ujung ke ujung lainnya melalui posisi tengah, tegangan keluaran berubah dari maksimum ke nol dan kembali ke maksimum lagi tetapi dalam proses mengubah sudut fasa 180 derajat. Hal ini memungkinkan LVDT untuk menghasilkan sinyal AC keluaran yang besarnya mewakili jumlah pergerakan dari posisi tengah dan yang sudut fasa mewakili arah pergerakan inti.
Aplikasi tipikal dari sensor transformator diferensial variabel linier (LVDT) adalah sebagai transduser tekanan, jika tekanan yang diukur mendorong terhadap diafragma untuk menghasilkan gaya. Gaya tersebut kemudian diubah menjadi sinyal tegangan yang dapat dibaca oleh sensor.
Keuntungan dari transformator diferensial variabel linier, atau LVDT dibandingkan dengan potensiometer resistif adalah linieritasnya, yaitu keluaran tegangannya terhadap perpindahan sangat baik, akurasi sangat baik, resolusi bagus, sensitivitas tinggi serta operasi tanpa gesekan. Mereka juga disegel untuk digunakan di lingkungan yang tidak bersahabat.
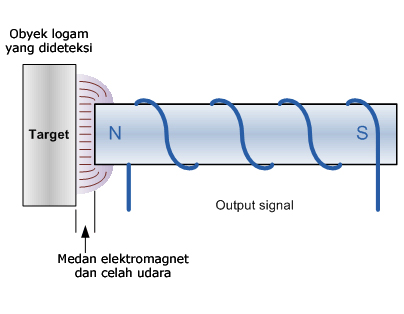
Sensor Kedekatan Induktif.
Jenis lain dari sensor posisi induktif yang umum digunakan adalah Sensor Jarak Induktif yang juga disebut sensor arus Eddy. Meskipun mereka tidak benar-benar mengukur perpindahan atau rotasi sudut, mereka terutama digunakan untuk mendeteksi keberadaan suatu objek di depan mereka atau dalam jarak dekat, oleh karena itu dinamakan “sensor jarak”.
Sensor jarak, adalah sensor posisi non-kontak yang menggunakan medan magnet untuk pendeteksian dengan sensor magnet paling sederhana adalah sakelar buluh. Dalam sensor induktif, kumparan dililitkan di sekitar inti besi dalam medan elektromagnetik untuk membentuk loop induktif.
Ketika bahan feromagnetik ditempatkan di dalam medan arus eddy yang dihasilkan di sekitar sensor induktif, seperti pelat logam feromagnetik atau sekrup logam, induktansi kumparan berubah secara signifikan. Sirkuit deteksi sensor jarak mendeteksi perubahan ini yang menghasilkan tegangan keluaran. Oleh karena itu, sensor jarak induktif beroperasi di bawah prinsip kelistrikan Hukum induktansi Faraday.
Sensor Kedekatan Induktif

Sensor jarak induktif memiliki empat komponen utama; Osilator penghasil medan elektromagnetik, kumparan penghasil medan magnet, rangkaian deteksi yang mendeteksi adanya perubahan medan saat benda masuk dan rangkaian keluaran yang menghasilkan sinyal keluaran, baik dengan kondisi normal tertutup (NC) atau normal buka (NO) kontak.
Sensor jarak induktif memungkinkan untuk mendeteksi objek logam di depan kepala sensor tanpa ada kontak fisik dari objek itu sendiri yang terdeteksi. Ini membuatnya ideal untuk digunakan di lingkungan yang kotor atau basah. Rentang sensor jarak "penginderaan" sangat kecil, biasanya 0,1 mm hingga 12 mm.

Selain aplikasi industri, sensor jarak induktif juga biasa digunakan untuk mengontrol arus lalu lintas dengan mengubah lampu lalu lintas di persimpangan dan persimpangan jalan. Putaran kawat induktif persegi panjang ditanamkan ke permukaan jalan aspal.
Ketika sebuah mobil atau kendaraan jalan raya lain melewati loop induktif ini, badan logam kendaraan mengubah induktansi loop dan mengaktifkan sensor sehingga memberi tahu pengawas lampu lalu lintas bahwa ada kendaraan yang menunggu.
Salah satu kelemahan utama dari jenis sensor posisi ini adalah bahwa mereka "Omni-directional", yaitu mereka akan merasakan benda logam baik di atas, di bawah atau di sampingnya. Selain itu, mereka tidak mendeteksi objek non-logam meskipun Sensor Jarak Kapasitif dan Sensor Jarak Ultrasonik tersedia. Sensor posisi magnetis lain yang umumnya tersedia meliputi: sakelar buluh, Sensor Efek Hall, dan sensor keengganan variabel.
Rotary Encoder
Rotary Encoder adalah jenis sensor posisi lain yang menyerupai potensiometer yang disebutkan sebelumnya tetapi merupakan perangkat optik non-kontak yang digunakan untuk mengubah posisi sudut dari poros yang berputar menjadi kode data analog atau digital. Dengan kata lain, mereka mengubah gerakan mekanis menjadi sinyal listrik (lebih disukai digital).
Semua encoder optik bekerja dengan prinsip dasar yang sama. Cahaya dari sumber cahaya LED atau infra-merah diteruskan melalui disk berkode resolusi tinggi yang berputar yang berisi pola kode yang diperlukan, baik biner, kode abu-abu, atau BCD. Detektor foto memindai disk saat berputar dan sirkuit elektronik memproses informasi menjadi bentuk digital sebagai aliran pulsa output biner yang diumpankan ke penghitung atau pengontrol yang menentukan posisi sudut aktual poros.
Ada dua tipe dasar encoder optik putar, Encoder Incremental dan Encoder Posisi Absolut.
Encoder Inkremental

Incremental Encoder, juga dikenal sebagai quadrature encoder atau relative rotary encoder, adalah yang paling sederhana dari dua sensor posisi. Keluarannya adalah serangkaian pulsa gelombang persegi yang dihasilkan oleh pengaturan fotosel sebagai cakram berkode, dengan garis-garis transparan dan gelap yang berjarak sama yang disebut segmen pada permukaannya, bergerak atau berputar melewati sumber cahaya. Encoder menghasilkan aliran pulsa gelombang persegi yang, jika dihitung, menunjukkan posisi sudut poros berputar.
Encoder inkremental memiliki dua keluaran terpisah yang disebut "keluaran kuadratur". Kedua keluaran ini dipindahkan pada beda fase 90o satu sama lain dengan arah putaran poros yang ditentukan dari urutan keluaran.
Jumlah segmen atau slot transparan dan gelap pada disk menentukan resolusi perangkat dan menambah jumlah garis dalam pola akan meningkatkan resolusi per derajat rotasi. Disk yang dikodekan tipikal memiliki resolusi hingga 256 pulsa atau 8-bit per rotasi.
Encoder inkremental yang paling sederhana disebut tachometer. Ini memiliki satu output gelombang persegi dan sering digunakan dalam aplikasi searah di mana hanya informasi posisi atau kecepatan dasar yang diperlukan. Encoder "Quadrature" atau "Sine wave" lebih umum dan memiliki dua output gelombang persegi yang biasa disebut channel A dan channel B. Perangkat ini menggunakan dua detektor foto, sedikit diimbangi satu sama lain sebesar 90o sehingga menghasilkan dua output sinus dan cosinus yang terpisah sinyal.
Encoder Inkremental Sederhana

Dengan menggunakan fungsi matematika Arc Tangent, sudut poros dalam radian dapat dihitung. Umumnya, optical disk yang digunakan pada encoder posisi putar berbentuk lingkaran, maka resolusi keluaran akan diberikan sebagai: θ = 360 / n, dimana n sama dengan jumlah segmen pada disk yang diberi kode.
Kemudian misalnya, jumlah segmen yang diperlukan untuk memberikan encoder inkremental resolusi 1o akan menjadi: 1o = 360 / n, oleh karena itu, n = 360 jendela, dll. Juga arah rotasi ditentukan dengan mencatat saluran mana yang menghasilkan output pertama, baik saluran A atau saluran B memberikan dua arah rotasi, kabel A mengarah B atau kabel B. Pengaturan ini ditunjukkan di bawah.
Keluaran Encoder Inkremental

Salah satu kelemahan utama encoder inkremental saat digunakan sebagai sensor posisi, adalah bahwa mereka memerlukan penghitung eksternal untuk menentukan sudut absolut poros dalam rotasi tertentu. Jika daya dimatikan sesaat, atau jika encoder kehilangan pulsa karena bising atau disk kotor, informasi sudut yang dihasilkan akan menghasilkan kesalahan. Salah satu cara untuk mengatasi kerugian ini adalah dengan menggunakan encoder posisi absolut.
Encoder Posisi Mutlak
Encoder Posisi Mutlak lebih kompleks daripada pembuat enkode kuadratur. Mereka menyediakan kode keluaran unik untuk setiap posisi rotasi yang menunjukkan posisi dan arah. Disk berkode mereka terdiri dari beberapa "trek" konsentris dari segmen terang dan gelap. Setiap trek independen dengan detektor fotonya sendiri untuk secara bersamaan membaca nilai posisi berkode unik untuk setiap sudut gerakan. Jumlah track pada disk sesuai dengan resolusi "bit" biner dari encoder sehingga encoder absolut 12-bit akan memiliki 12 track dan nilai kode yang sama hanya muncul sekali per revolusi.
Disk Kode Biner 4-bit

Satu keuntungan utama dari encoder absolut adalah memori non-volatile-nya yang mempertahankan posisi encoder yang tepat tanpa perlu kembali ke posisi "home" jika listrik mati. Sebagian besar pembuat enkode putar didefinisikan sebagai perangkat "satu putaran", tetapi perangkat multi-putaran absolut tersedia, yang mendapatkan umpan balik selama beberapa putaran dengan menambahkan disk kode tambahan.
Aplikasi khas dari encoders posisi absolut adalah dalam hard drive komputer dan drive CD / DVD adalah posisi absolut dari drive read / write head dipantau atau di printer / komplotan untuk secara akurat menempatkan print head di atas kertas.
Dalam artikel tentang Sensor Posisi ini, kita telah melihat beberapa contoh sensor yang dapat digunakan untuk mengukur posisi atau keberadaan objek. Dalam artikel selanjutnya kita akan melihat sensor yang digunakan untuk mengukur suhu seperti termistor, termostat, dan termokopel, dan biasanya dikenal sebagai Sensor Suhu.

Comments
Post a Comment